恒江インテリジェントテクノロジー有限公司は、ベーキングロボットシステムおよび食品グレードの産業用自動化機器の専門製造・供給企業です。当社の製品ポートフォリオは、独立したデルタおよびSCARAロボット、柔軟なロボットワークステーション、フルラインの仕分け・包装システムを含み、すべて現代のベーカリーや冷凍食品生産環境で高速・高精度かつ衛生的な作業を可能に設計されています。単一のプロセスノードを自動化する単一ユニットロボットから、ドーナツ、ピザ、エッグタルトの生産のための完全なターンキーラインまで、恒江はスケーラブルでモジュール化されたソリューションを提供し、労働コストを削減し、人的ミスを排除し、スマートファクトリー基準の要求に応えるスループットを向上させます。
経験者としてデルタロボットメーカー恒江は、機械構造、モーションコントロールファームウェア、エンドエフェクター金型を網羅するHJ-D11003-1シリーズ並列マニピュレーターを一から設計・製造しています。デルタロボットは並列運動学的アーキテクチャで動作します。3本の独立駆動アームが固定された上部フレームに接続され、すべてのジョイントアクチュエーターはアームアセンブリと共に動くのではなく、固定されたベースに残ります。これにより移動質量を極めて低く抑えられ、デルタロボットがシリアルアーム型ロボットでは追及できないサイクルレートや加速度を実現できる根本的な理由です。
HJ-D11003-1シリーズの技術的アーキテクチャ:3本の上腕はベースプレートに同心円状に取り付けられたサーボモーターで駆動されます。カーボンファイバーまたはアルミニウム製の下部リンクは、ボール&ソケットジョイントを介して中央の可動プラットフォームに動きを伝え、反動を排除します。標準的な非回転軸バリアントは純粋なXYZピックアンドプレイスを扱い、回転軸バリアントはエンドエフェクターに4つ目の軸(R軸)を追加し、ピッキング時の向き補正を可能にします。これは、製品がインフィッドコンベヤー上でランダムな角度で到着する場合に重要です。ペイロード容量は軽量製品(通常1ユニットあたり3kg未満)を対象としており、作業用エンベロープ直径は一般的に800〜1,100mmの範囲、垂直ストロークは最大300mmです。
制御とビジョン統合:各ロボットにはサーボドライブキャビネットと、恒江のモーションプランニングソフトウェアを動かす専用ロボットコントローラーが組み合わされています。機械視覚は、コンベヤーベルトの上に同軸に設置された産業用カメラによって処理されます。ビジョンシステムは製品の位置と角度データをリアルタイムでコントローラーに送信し、コントローラーはマルチロボットクラスター内の個々のロボットピック割り当てを計算します。ビジョンホストとロボットコントローラー間の通信プロトコルは標準的な産業用イーサネット(EtherCATまたはModbus TCP)を使用し、追加のミドルウェアなしでサードパーティ製SCADAシステムとの統合を可能にします。
衛生設計の考慮事項:食品ゾーンに露出するすべての表面は304または316のステンレス鋼ファスナーと食品安全ポリマーリンクハウジングを使用しています。IP65規格のモーターエンクロージャーは蒸気や洗浄水の侵入を防ぎます。ケーブル管理は密閉された導管チャネルを通して配線をルーティングし、ゴミがたまる可能性のある水平面を排除します。
該当する製品:ドーナツ、餃子、蒸しパン、クロワッサン、エッグタルト、チョコレートピース、その他の成形または成形された焼き菓子や冷凍食品。HJ-D11003-1は、回転軸を使わない構成と回転軸の両方の構成で提供されています。正確な運動学的パラメータ、到達範囲、ペイロード評価については各モデルの詳細ページをご覧ください。
評価を行う企業へデルタロボットメーカー横江は世界的に工場受理試験(FAT)、遠隔試運転支援、OEM/ODM協力を提供しています。ドーナツやピザの選別ラインでのデルタロボットの参考動画デモンストレーションは、ベーキングロボットビデオライブラリ.
理解SCARAロボットの価格自動化プロジェクトに取り組む前に要素は不可欠です。恒江のSCARAロボット(選択的コンプライアンス組立ロボットアーム)は独立して開発・製造されており、価格設定は販売代理店のマークアップではなく実際のエンジニアリング価値を反映しています。現在のラインナップには、HJ-SC1250-R、HJ-SC1050-R、HJ-SCD0625A、HJ-SCD7840の4モデルがあり、アームリーチ(625mmから1,250mm)、ペイロード(5kgから30kg)、Z軸ストロークで区別されています。
SCARAロボットの価格を決定する要因は何ですか?食品グレードのSCARAシステムの最終コストには主に5つの要素があります。
アームリーチとペイロードクラス:リーチが長くペイロードが高いため、より重い構造部品と大型サーボドライブが必要となり、単価が直接増加します。例えばHJ-SC1250-Rは1,250 mmのリーチと30 kgのペイロード能力を持ち、パレット層の取り扱いに適しています。一方、HJ-SCD0625Aは625 mmリーチで精密選別を目標とし、軽量なペイロードエンベロープとそれに伴う低価格帯を特徴としています。
軸数:標準的なSCARAロボットは4つの軸(J1回転、J2回転、Z直線回転、R手首回転)で動作します。複雑な向き付け作業のために第5軸を追加する構成もあります。追加の軸はサーボ数とコントローラーの複雑さを増やし、価格に影響を与えます。
ビジョンシステムの含め:ビジョンシステムなしで単独のロボットユニットが見積もりを出すと、基本価格が基準となります。恒江の統合機械ビジョンモジュール(高解像度産業用カメラ、LEDリング照明、リアルタイム画像処理ユニット、キャリブレーションソフトウェア)とセットされると、システム価格は上昇しますが、即座に展開可能なターンキーソリューションを提供します。
取り付け配置:HJシリーズは天井取り付け(逆向き)設置を標準でサポートし、床面積を最適化し、清掃のアクセス性を向上させています。特別なレイアウト用のカスタムフロアスタンドフレームやガントリーマウントは、追加のエンジニアリングおよび製造コストを伴います。
制御システムとソフトウェアライセンス:恒江の統合ドライブコントロールキャビネットは、サーボアンプ、ロボットモーションコントローラー、安全リレー、HMIタッチスクリーンを一つの筐体に統合しています。この自主開発のソフトウェアプラットフォームは、リモート監視、空中ファームウェアアップデート、複数製品ラインのレシピ管理をサポートしており、すべて標準パッケージに含まれています。
SCARAの主な技術仕様:4軸すべてでリピート位置決め精度は±0.025mmであり、10万サイクルの耐久テストで検証済みです。最大エンドエフェクタの線形速度は2 m/sに達します。ロボット全体の重量は約40kgで、オーバーヘッド構造の要件を簡素化しています。すべての継ぎ目は最低IP54の密閉処理が施されており、洗浄環境にはIP65が利用可能です。
各モデルと構成の詳細価格については、恒江の営業チームまでお問い合わせください。オンライン調査ページ。
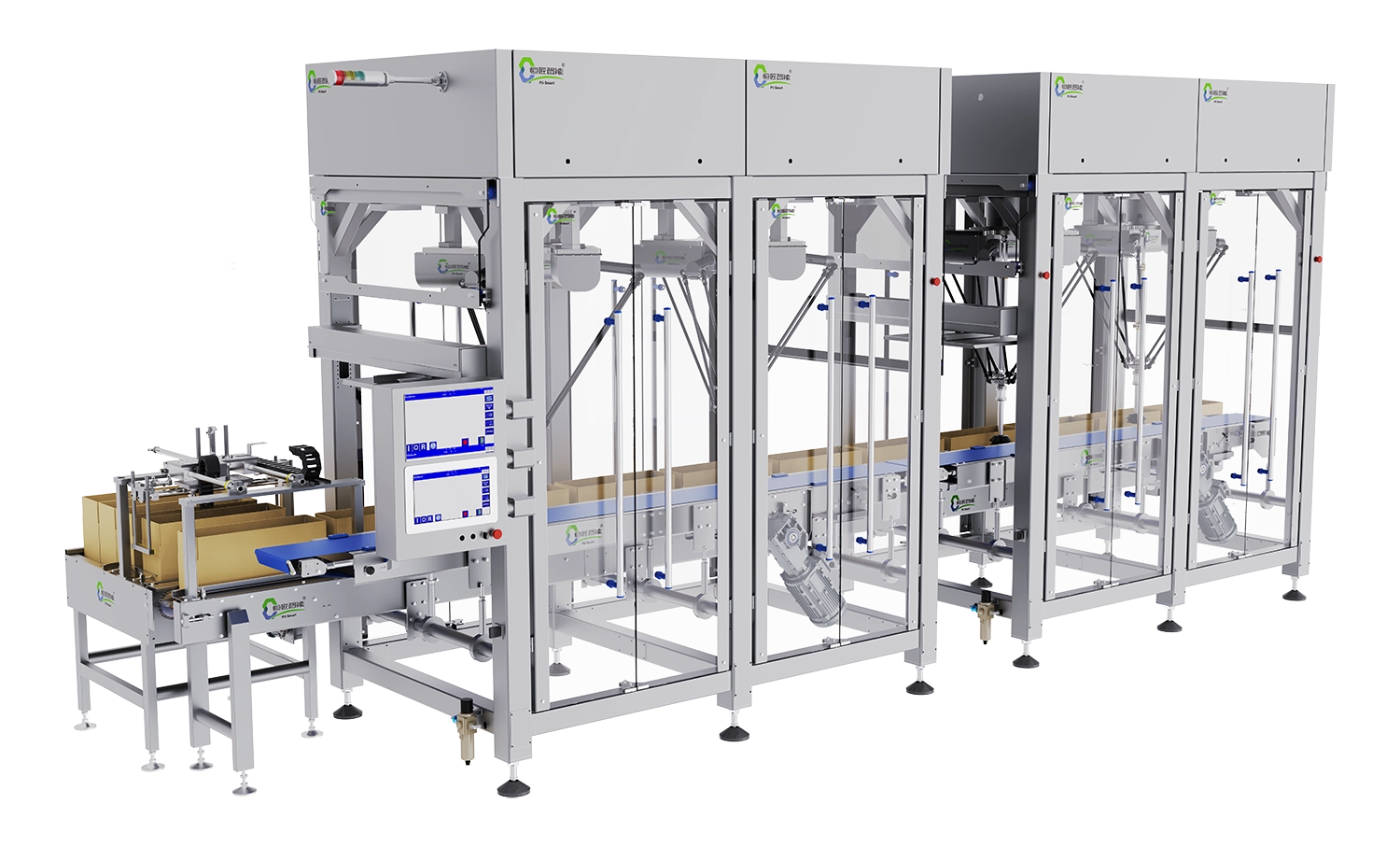
についてSCARAロボットワークステーション衡江から来たのは、食品グレードのSCARAロボット、機械ビジョン、送出輸送コンベヤー、ステンレスフレーム、安全ガード、統合制御キャビネットを一つの展開可能なユニットに統合した、事前設計された自動化セルです。このワークステーションレベルの統合により、個々の部品を購入して独立して統合するよりも、現場でのエンジニアリング時間を大幅に短縮できます。
コアワークステーションアーキテクチャ:セルレイアウトでは、SCARAロボットをインフィッドコンベヤーの中央に位置付けています。ロボットの作業範囲の上流にあるビジョンステーションは、入ってくる各製品の画像を撮影します。処理済み座標はEtherCATを介して20ミリ秒の遅延以内にロボットコントローラーに転送され、製品がピックゾーンに到達する前に正確なピックデータをロボットが受信できるようにします。片側または両側のアウトフィードコンベヤーは、選別された製品を下流の包装やトレイ積み込みステーションへ運びます。
恒江で示された看板アプリケーションは冷凍卵タルトの殻の仕分け・積み重ね作業台です。この構成では、新鮮に型を剥がした冷凍エッグタルトの殻がランダムな向きでインフィードベルトに届きます。視覚システムは各シェルの中心位置と向き角を特定します。SCARAロボットは各シェルをピックアップし、±0.02mmの繰り返し性で指定されたスタック位置に配置し、あらかじめ設定された数の均一なスタックを形成し、それを包装ステーションに転送します。このセルは、3〜4人の手動操作者が生み出せるスループットレートを上回り、人間との接触による汚染は一切ありません。
衛生的な構造の詳細:ワークステーションのフレームは完全に溶接された304ステンレススチールで、表面は電気研磨されています。コンベヤーベルトは食品グレードのPU材料を使用しています。エンドエフェクターグリッパーのすべての空気圧部品は、外部に露出することなく密閉されたロボットアームハウジング内に取り付けられています。電気キャビネットは食品ゾーンの外側に設置されており、熱や電磁干渉が製品の品質に影響するのを防ぎます。
スケーラビリティ:単一のSCARAワークステーションは単独で運用することも、より大きなネットワークに接続することも可能ですSCARAロボット仕分け包装ラインそれには自動トレイの積み込み、カートン化、ケースパッキングが含まれます。モジュラー通信アーキテクチャ(OPC-UA互換)により、ワークステーションはサイクルカウント、リジェクトレート、グリッパーフォーステレメトリーなどの生産データを中央のMESまたはERPシステムに報告できます。
このワークステーションは、フルラインソリューションにコミットする前に1段階のプロセスステップを自動化したいメーカーにとって、エントリーレベルの統合経路でもあります。参照サービスと支援設置、受け入れ試験、オペレーターの訓練詳細に関するセクション。
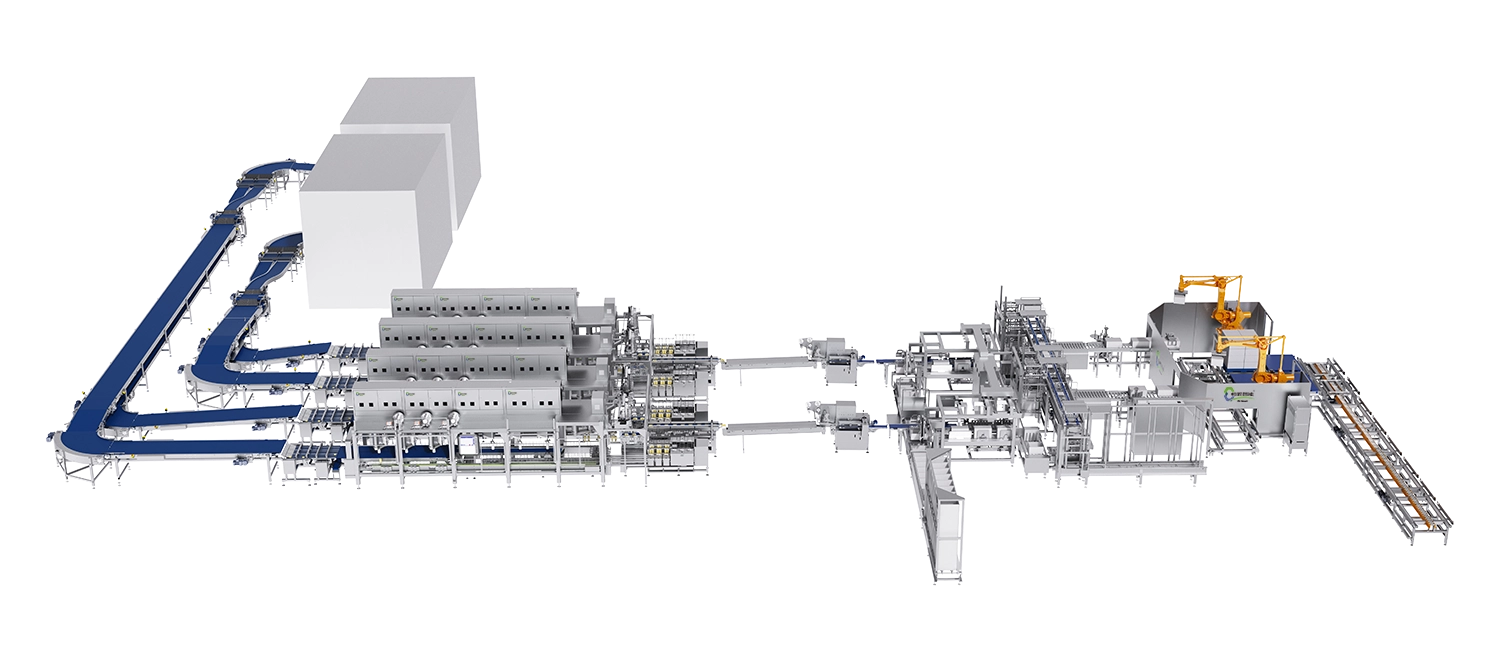
についてデルタロボットワークステーション衡江からは、1台以上のHJ-D1003-1デルタロボットを共有コンベヤーベルト上に配置し、クラスター内のすべてのロボットでピック割り当てを管理する統一ビジョンシステムを備えています。このマルチロボットアーキテクチャは、単一のロボットがボトルネックとなる高速な流入ラインで非常に高いスループットを達成するための業界標準アプローチです。
シングルユニットデルタワークステーション:500〜800mm幅のベルトの上に取り付けられた単一のHJ-D11003-1は、製品の形状やグリップサイクル時間に応じて約60〜80ピック/分の速度で到達します。ビジョンシステムは構造化されたLEDアレイでベルトを照らし、プログラムされたトリガーレートで画像を撮影し、検出された各製品に対してXY位置と角度データを出力します。ロボットコントローラーは保留中のピックのキューを維持し、アームの移動距離を最小化する順序(最近傍スケジューリング)で実行し、実効的なスループットを最大化します。
多ユニットデルタクラスター:ライン速度や製品密度が単一ロボットの容量を超える場合、2台、3台、またはそれ以上のデルタロボットがコンベヤー方向に沿って直列に配置されます。共有ビジョンホストは、各入荷製品を位置ゾーンやロボットの可用性(負荷分散)に基づいて特定のロボットに割り当てます。もし1台のロボットが前のピックを完了している場合、割り当ては次の利用可能なユニットに進みます。この協調的なスケジューリングにより、通常の運転条件下でピックゾーンから製品が未処理で出ることが保証されます。
ドーナツ仕分けアプリケーション:ドーナツロボット仕分けワークステーションアプリケーションでは、恒江がマルチロボットのデルタクラスターを展開し、揚げたてや冷凍ドーナツをサイズ、形、間隔でトレイや包装型に仕分けします。ビジョンシステムの欠陥検出モジュールは同時に破損や変形したドーナツをチェックし、リブートを別のレーンに転送します。セル全体が恒江のセルと直接接続しているドーナツ成形生産ライン上流側で、生地の成形から仕分け、包装までの連続した自動化された流れを作り出します。
エンドエフェクターの金型オプション:恒江は一般的なベーカリー製品に適合した独自のグリップを供給しています。食品グレードのシリコーン製真空吸盤は滑らかな表面の製品、不規則な形状には適応型機械式指、繊細な層状ペストリー用の針状ツールなどです。エンドエフェクターのクイックチェンジシステムにより、オペレーターは工具なしで2分以内に製品タイプを切り替えることができます。
安全性とコンプライアンス:各ワークステーションには、すべてのオペレーターアクセスポイントにライトカーテン、非常停止回路、ISO 13849 PLdに準拠した安全指定リレーモジュールが装備されています。制御ソフトウェアは、安全ライトカーテンが部分的に遮断されている場合(減速モード)に速度と力の制限を強制し、ハードストップを行う代わりに、オペレーターの短い入入時の生産中断を最小限に抑えます。
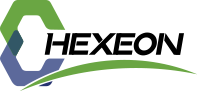
についてSCARAロボット仕分け包装ライン横江からの生産システムは、未仕分けの食品を入口で取り出し、充填され密封された箱やトレイを出口で届ける完全な生産システムで、手作業の介入はありません。このラインレベルのソリューションは恒江のロボットポートフォリオにおける最高レベルの統合を示し、厳格な生産一貫性要件を持つ大量SKUを運用するメーカー向けに設計されています。
システムアーキテクチャ:ラインは工場の利用可能な床面積に合わせて線形またはL字型に配置された6つの機能ゾーンで構成されています。ゾーン1はインフィッドバッファーで、上流の焼製または冷凍工程からの製品が拡散コンベヤーに積み込まれ、単一層に分散されて視覚検査が行われます。ゾーン2は視覚検査ステーションで、寸法、形状、色の均一性、表面欠陥の100%製品検査を行います。ゾーン3はSCARAロボットピッキングゾーンで、1台または2台のSCARAロボットが、受け入れられた製品を並列のインデックスコンベヤー上に配置したトレイや包装金型に調整してピック&配置を行います。ゾーン4は、ロボットゾーンのアウトフィードに統合された重量チェックスケールによるトレイ充填の検証を担当します。ゾーン5は自動トレイの蓋(カートニングモジュール)で、フィルムまたは紙の蓋を貼り付け、トレイの縁を密封します。ゾーン6はケース梱包・パレット化モジュールで、密封されたトレイを出荷ケースにまとめ、パレットに積み重ねます。
用途:冷凍卵タルトの殻の仕分けおよび包装生産ライン。ロック解除された冷凍卵タルトの殻はゾーン1から、毎分最大200個のペースでラインに入ります。ゾーン2の視覚システムは、破損または変形した殻(適切に整備された成形ラインの出力の2%未満)を識別し、排除します。ゾーン3のSCARAロボットは、受け入れられたシェルを6キャビティまたは12キャビティのプラスチックトレイに配置し、並列コンベヤー上で±0.5mmのトレイ位置精度で位置付けしました。完成したラインは、密閉されラベル付きのトレイをコールドチェーン配送に備えて届けます。上流の様子をご覧ください香港式エッグタルト成形生産ラインこの仕分け・包装システムに入る前に、成形された殻がどのように生産されるかの背景について。
制御統合:ライン全体が21インチのタッチスクリーンHMIを備えた単一の監督PLCで動作します。各ゾーンのサブコントローラーはPROFINETを介して監督PLCと通信します。オペレーターはゾーンごとのスループット、アラーム履歴、拒否率、OEE(全体機器有効性)指標をリアルタイムで監視できます。システムは複数の製品SKUのレシピ保存をサポートしています。SKU間の切り替えは、HMIでのレシピ選択と、物理的なエンドエフェクターおよびトレイのフォーマット変更だけで、15分以内に実現可能です。
敷地と設備:エッグタルトシェルのフルラインは長さ約15〜20m、幅3〜4mを占めます。電力需要は380V三相、50Hzで、通常は合計15〜25kWの接続負荷です。グリップ作動および空気圧トレイクランプには0.6MPaの圧縮空気が必要です。CIP(クリーンインプレイス)用の水接続は、施設の衛生ゾーンの分類によって任意です。
横江の自動ドーナツ仕分けラインは、SCARAとデルタロボットを組み合わせ、ドーナツの物理的特性に最適化された協調的な構成で、丸型または楕円形、柔らかい変形可能な質感、多様なガラス面、そして高容量のフライヤーや校正機からの高速ラインに対応しています。この線はSCARAとデルタロボットの複合利用恒江の統合ワークステーションポートフォリオの一部。
なぜドーナツに専門的なラインが必要なのか:ドーナツは独特の取り扱いの難しさを伴います。その柔らかく粘着性のある表面は、真空カップの選択が非常に重要です。吸い込みが強すぎると製品が変形します。少なすぎるとドロップが起こります。円形の形状により、方向性の制御は方向性製品ほど重要ではありませんが、パッケージトレイ内の間隔を一貫させることはプレゼンテーションに不可欠です。大量生産のドーナツライン(1時間あたり3,000〜6,000個を生産する産業用フライヤー)では、複数シフト作業中の疲労による性能低下なしに持続的な処理能力を持つロボットクラスターが必要です。
ドーナツのライン構成:デルタロボットは、フライヤーのアウトフィードコンベヤーから中間トレイへの高速ピック&プレイス作業を担当します。1ユニットあたり60〜100ピックのサイクルレートを3台または4台のロボットクラスターでまとめて行うことで、産業用フライヤーの生産量と一致します。SCARAロボットは副次的な作業を担当します。中間トレイから事前に仕分けされたドーナツを選び、正確な向き、カウント確認、層積み重ねで小売パッケージに配置します。この役割分担は各ロボットの強みに活かしています。デルタは純粋な速度、SCARAは精密な配置、そしてより重いペイロードです。
釉薬の互換性:ドーナツラインのエンドエフェクター金型は、釉薬付き、砂糖コーティング、平地の表面向けに設計されています。調整可能な真空調整器を備えたシリコーン吸盤は表面の変化を補正します。ビジョンシステムの反射度正規化アルゴリズムは、マットグレージングとグロッシーグレージング間のコントラスト変動を、製品バリアントごとに別々のキャリブレーションを必要とせずに処理します。
成形ラインとの統合:この包装ラインは恒江のドーナツ成形生産ラインこれにより、生産から包装までの連続したチェーンが形成されます。恒江は、成形ラインと選別・包装ラインの両方を単一の契約でカバーし、統一された試運転とオペレーターの研修を提供。
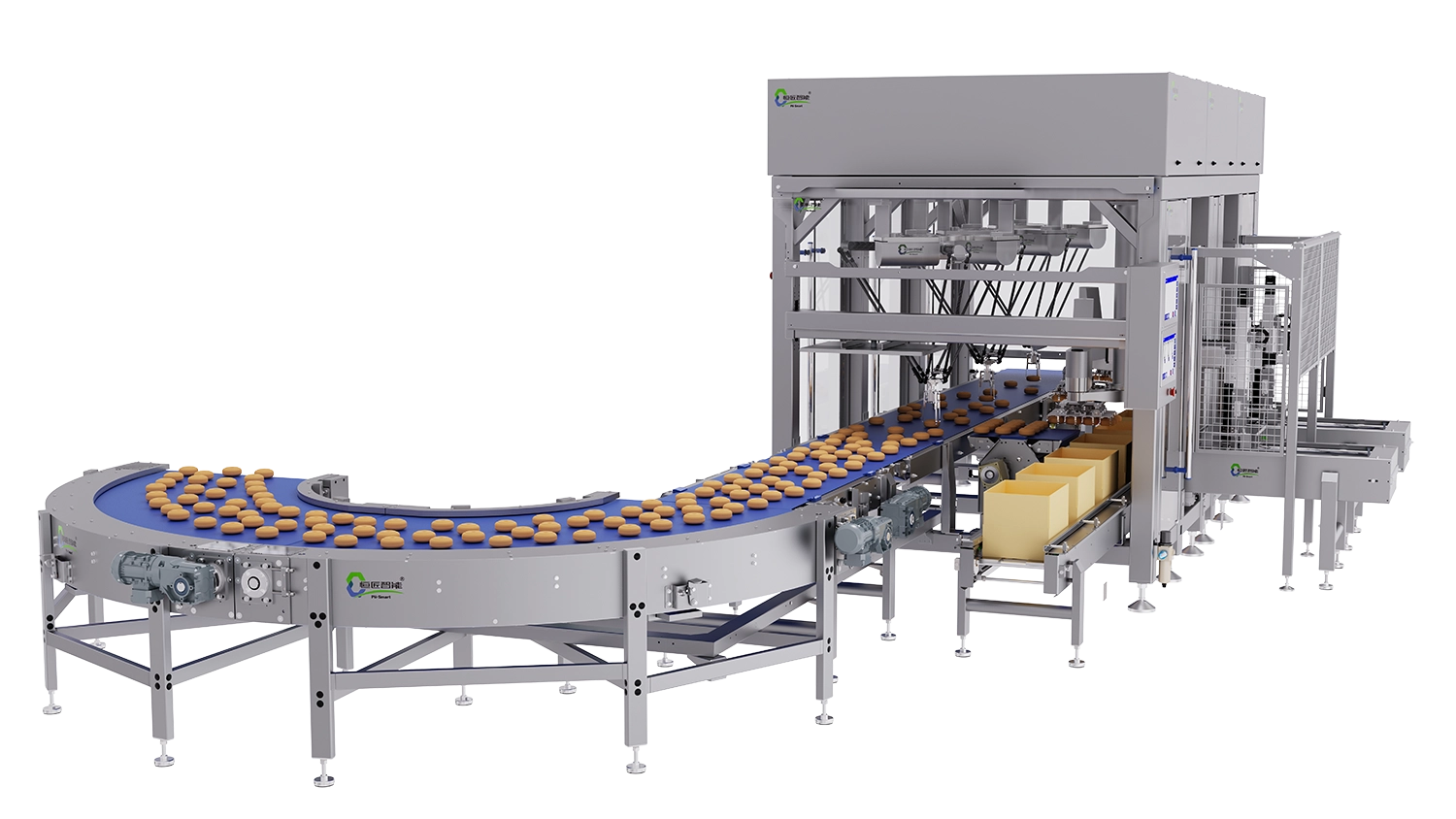
について自動ピザ仕分け包装ライン衡江では、冷凍ピザの仕分けと包装を扱うために、二重または多重のデルタロボットの展開を行い、ミリ単位の精度でパックに入れなければならない平らで大径の食品の特有の課題に対応しています。
ピザ特有の取り扱いの課題:冷凍ピザはサイズが大きく(通常直径200〜350mm)、ドーナツやペストリーに比べて比較的重く(1単位あたり200〜500g)、トッピング層やクラストの端を傷つけないまま、厳密なカートンスリーブに入れる必要があります。パッケージカートンの内側寸法は、両側にわずか3〜5mmのクリアランスしか残さないため、ロボットの配置精度と再現性はクリアランスの許容差よりも厳しくなければなりません。恒江のHJ-D11003-1は回転軸を持ち、XY平面で±0.5mmの配置反復性を全速動作で達成し、標準的なピザカートンフォーマットの許容範囲内です。
二重ユニットおよび多ユニットデルタ構成:衡江のポートフォリオに記載されているピザラインには、ピザ仕分け・包装ラインAおよびピザ仕分け・包装ラインBがあり、異なるスループット層やレイアウト構成を表しています。ラインAは中規模ライン(1時間あたり800〜1,500枚のピザ)用に2台のロボットデルタクラスターを使用しています。ラインBは3台または4台のロボットクラスターを使い、産業用デッキオーブンやトンネルベーキングシステムの出力に匹敵する大容量ラインを形成します。両ラインは同じビジョンと制御アーキテクチャを採用しており、ロボット数とコンベヤー幅の違いのみです。
カートンの組み立てと封:包装ラインは、包装ゾーンの入口に自動カートン設置機、デルタロボットがピザを組み立てた箱に入れるロボット装填モジュール、出口にホットメルトグルーシーリングステーションを統合しています。印刷・貼布方式のラベルシステムは、封印直後にバッチコード、賞味期限、重量などの可変情報を適用します。ピザピックからラベル付き密封パックまでの全シーケンスは、高容量ラインで1ユニットあたり8秒未満で完了します。
コールドゾーンの考慮点:冷凍ピザラインは低温生産ゾーン(通常0°Cから10°Cの環境)で運用されます。恒江のデルタロボットは、すべての軸受面に低温グリースを施し、冷蔵室環境での持続運転に耐えた密閉モーター巻線が指定されています。電気キャビネット内の結露管理は、温度変化時に湿気の蓄積を防ぐためにサーモスタット制御ヒーターを使用します。
上流の統合:ピザの仕分け・包装ラインは恒江のピザ成形生産ラインおよびそれに関連するベイキングトンネル出力です。これにより、ピザ工場の自動化プロジェクトを単一のサプライヤーから調達可能となり、プロジェクト管理、保証責任、長期的なサービス調整が簡素化されます。
両方のピザライン構成の実演動画は、こちらをご覧ください。ベーキングロボットビデオセクション.
恒江インテリジェントテクノロジー有限公司は垂直統合型の製造業者であり、機械設計、サーボドライブの開発、ロボットモーションコントロールソフトウェア、機械ビジョンアルゴリズム、システム統合はすべて社内で行われています。これにより、ロボット、ビジョン、制御間の重要なインターフェースにおいて、サードパーティ統合システムでよくある故障点であるサプライヤー間互換性のリスクがありません。
すべての設備は出荷前に恒江の施設で厳格な工場受理試験(FAT)を受け、代表的な製品で顧客の生産状況を模擬します。設置と試運転は恒江の技術チームによって行われています。試運転後の支援には、IoT対応の制御プラットフォームを通じたリモートモニタリングが含まれ、故障ログ、サイクルデータ、性能指標へのリアルタイムアクセスが可能です。サービスフレームワークの詳細な説明、例えば機器検査プロトコル、設置基準、保証条件については、サービスと支援ページ。
横江はまた、ペストリー、クロワッサン、エッグタルト、ドーナツ、ピザ、パイの各カテゴリーを網羅した完全な製パンラインも提供しています。ロボット仕分け・包装ラインと衡江成形・焼製ラインを組み合わせることで、技術責任が一つのポイントを持つ完全自動化されたスマートファクトリーセルが実現します。全編を探検しよう生産ラインポートフォリオ上流の機器オプションについては、またはヘクシオン・グループの会社ページ企業の背景、製造能力、文化に関する情報。
製品ごとの問い合わせ、価格の話し合い、工場訪問の手配については、お問い合わせページ恒江の技術営業チームに直接連絡を取るためです。